联系电话:020-88888888
联系电话:020-88888888
最优化研究的是,在现实问题上,使用数学模型建模,并在若干约束的条件下,求问题的最优解。
它的一般形式如下:
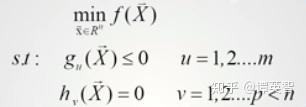
g和h函数为约束函数,求函数f的最值
f函数只由一个优化问题组成
f函数由多个优化问题,根据一定的比重,加权组成。
通常写成:f=w1*f1 + w2*f2 ...
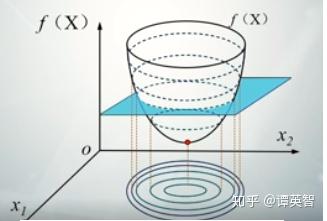
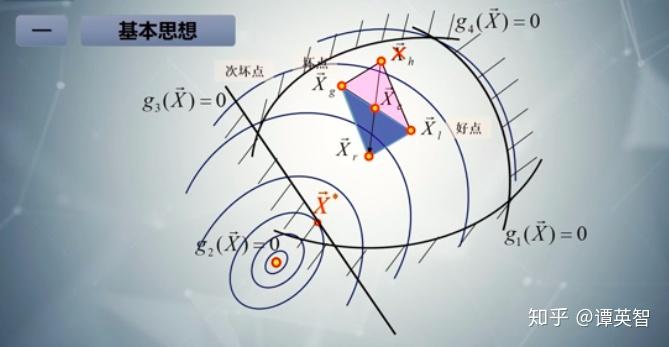
如下图,一个立体面,使用一个平面把立体面切开,并投影到x y而得到的曲线,称为等值面

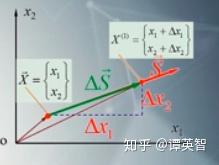
假设f(x1, x2),那么对f对X的方向导数如图所示
先对函数在(x1, x2)进行x1求偏导,然后再在(x1+e, x2)求偏导。e趋向零
对函数f(x)求方向导数,当在x点,沿方向导数相同或相反方向,为最速方向

分别对函数f进行一阶求导和二阶求导,可以对函数进行二次展开。其中二阶求导公式为Hessian矩阵
在集合内的任意两点,如果它们的连线都落在集合内,那么称集合为凸集


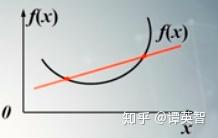
如图所示,如果函数上的任意两点连线,都高于两点内的函数值,称为凸函数
对于问题,如果f,g,h都为凸函数
那么局部极小点,必为全局最优解
因为在连续空间内,函数必然呈现单峰性,要么单调下降,要么单调上升,要么先下降,后上升

以上两图分别表示了凸函数的极值和非凸函数的极值情况
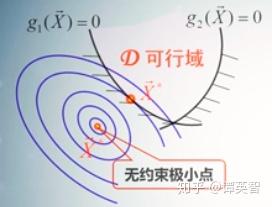
那么有下图
- 任意在g取一个点x,对g取导数,对f取导数 - 如果导数相同,那么为极值点 - 否则取如图方向,进行x+u进行探索。其中u为沿可用方向的值
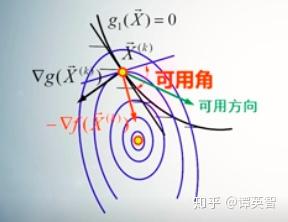
如图,可以看出如果f的负导数如果与约束条件的导数线性相关,则得到极值点
否则可以进行迭代优化

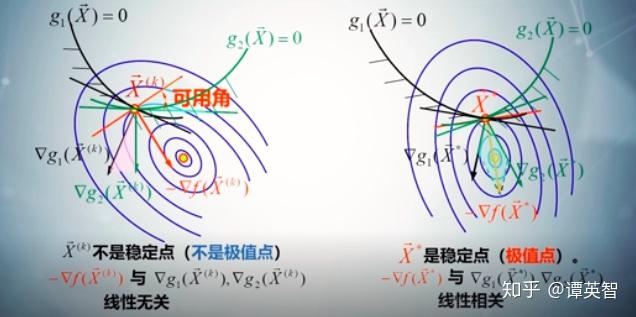
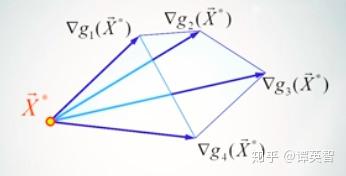
f导数与约束条件导数线性相关为,上式得到的系数都为正数
图形意义如下
可以看出,KT条件可以在每一步,通过选取一个下降的方向,得到一个更优值,所以对于凸函数,得到的极值点,一定为全局最优点。
但是如果对于非凸函数,那么得到的极值点,有可能不是全局最优解

通过选取方向S,进行a步长的探索,求得一个f_k+1,如果选取的方向正确和步长适当,那么函数f,就会再下一个迭代得到一个更优解
一般来说,选取其中一个终止条件即可
有时可能需要结果点距和值差准则来判断是否终止
对于凸函数f(x)无约束优化,函数值必然呈现高低高的分布
那么我么可以任意选取两个点x_left, x_right,然后再在中间选取两个点 x_mid_left, m_mid_right.
那么情况有可能是
那么极值点必然在区间外的左边
那么极值点必然位于区间外的右边
那么极值点必然位于x_mid_left和x_right之间
此时可以消除不可能的区间,从而得到一个更小的搜索范围,进行迭代搜索
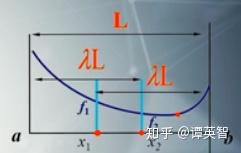
其中为了得到中间的两个点,如果采取每次选取的区间的比例都相等
可以得到系数刚好为0.618

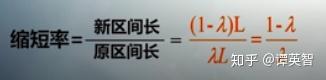
通过计算函数f的导数,取反,得到方向S,然后x沿S方向前进u长,得到一个更优解
一般来说在远离极值点时,收敛比较快,由于梯度比较大。
但是在临近极值点的时候,梯度会趋向与零,导致收敛速度迅速减慢。
此时需要结合具有二次收敛的共轭方向法,迅速逼近极值点
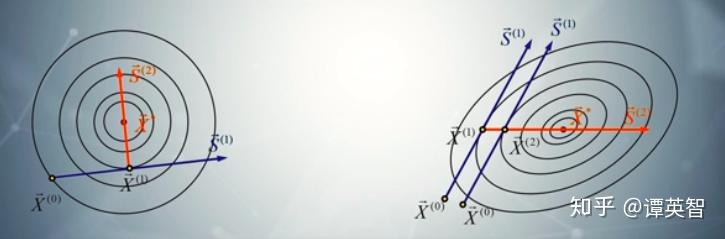
根据泰勒展开式,任意函数都能展开为二阶的二次函数
而二次函数为凸函数,可以通过对二次泰勒展开式对x求导,并导数为零,得到二次函数的极值点x_k,然后再在x_k,对f函数进行泰勒展开,并继续求导,不断逼近极值点


- 通过求导,得到方向S - 如果总是取步长为1,那么有可能搜索效率偏低 - 但是步长过大,又有可能使得得到的下一个值更差 - 如果函数不能二次求导,则牛顿法无法进行 - 计算二次导数,使得计算困难
由于计算复杂,一般在工程上不直接使用牛顿法来计算极值
而是通过它的变种,简化计算复杂度,来应用于工程,例如下面的变尺度法

通过牛顿法,公式有上图
如果设置H_k为单位矩阵,那么公式则为梯度法
如果H_k是Hession举证,则为牛顿法
有没有办法,可以通过迭代,让H_k从单位矩阵逼近Hession矩阵
那么有H_k+1=H_k + C,其中H_1为
根据泰勒展开式,进行二阶展开,并令导数为零,使用x_k, x_k+1,代入展开式,求得C的表示
那么既可以在每次迭代的时候,通过修正,不断逼近Hession矩阵
通过构造函数,使得约束优化问题转化为无约束优化问题。从而简化优化算法
如果初始点在可行域内
可以对函数f(x),g(x)<=0构造函数
p(x)=f(x) - r/g(x)
由于初始点x在可行域内,那么必然x满足g
使用无约束优化求解极值,当x越接近边界g(x)时,g(x) -> 0
会导致1/g -> 无穷大
使得p(x)越来越大
所以这会迫使函数的极值与边界有一段距离
通过不断使得r的值变小,可以让极值点不断逼近边界值
当r趋于零时,p(x)的极值点与f(x)的极值点重合
如果初始点在可行域外
可以建立公式
p(x)=f(x) + M{max(g(x), 0)}
其中st: g(x)<0
当x不满足g时,那么g>0
此时M就会对函数进行惩罚
通过无约束优化的方法
会让不在可行域的点,不断的向可行域拉回来
通过迭代M from 1 to no limit
会迫使函数的极值点落在可行域内
通过把内罚函数和外罚函数结合
可以得到内外罚函数
从而打破x只能落在可行域的条件

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...

某某自来水业务系统,是一套适合各种规模自来水公司的网络版自来水多种类业务管理软件。根据各大自来水公司存在的问题和需求自主...
 QQ:88888888
QQ:88888888 13899999999
13899999999

 返回顶部
返回顶部
